Rosie Bringup Procedure
- Checkout and compile the following stacks into your ROS overlay. Contact Ingo if you do not have an access.
ias_manipulation ias_manipulation_nonfree mapping tumros-internal
- Add your overlay and the “aux” folder to your package path by sourcing the following in your “.bashrc”
export ROS_PACKAGE_PATH=$HOME/ros/overlay:/opt/ros/electric/aux:$ROS_PACKAGE_PATH
- make sure your ssh keys are working (authorized on the robot and loaded into your agent)
- make sure, the robot computers ssh fingerprints are known.
- Setup halcon environment variables by putting the following into your “.bashrc”:
export HALCONROOT=/usr/local/halcon10
export HALCONARCH=x86sse2-linux2.4-gcc40
export HALCONARCH=x64-linux2.4-gcc40
export HALCONIMAGES=${HALCONROOT}/images
export PATH=${HALCONROOT}/bin/${HALCONARCH}:${PATH}
export LD_LIBRARY_PATH=${HALCONROOT}/lib/${HALCONARCH}:${LD_LIBRARY_PATH}
export PKG_CONFIG_PATH=/usr/lib/pkgconfig/
export GENICAM_ROOT_V1_1=${HALCONROOT}/genicam
export LD_LIBRARY_PATH=${LD_LIBRARY_PATH}:${GENICAM_ROOT_V1_1}/lib64
- Rosmake “rosie_dashboard” and “rosie_bringup” packages.
- Turn on both arms using the switch on the Kuka control boxes and wait for 5min.
- The configuration of the key switch on the teaching pendant has to be as following. Possibly you need to disengage the red emergency switch and press the button right of the key switch (the one with “I” symbol)
- Disengage the emergency stop for the base and the PC modules.
- Re-connect power for the Kinect sensor (TODO: still needed? If yes upload the pic)
- Launch rosie_dashboard
{kind=link}
{kind=link}
{kind=link}
rosrun rosie_dashboard rosie_dashboard
- Turn on the relays (you should hear the click-click sound)
rosrun power_relay on
- Setup yarp
rosrun yarp2 yarp detect rosrun yarp2 yarp namespace /kuka rosrun yarp2 yarp detect --write
- Set ROS_MASTER_URI in ~/.bashrc:
export ROS_MASTER_URI=http://leela:11311
- Run the rosie.launch file:
roslaunch rosie_bringup rosie.launch
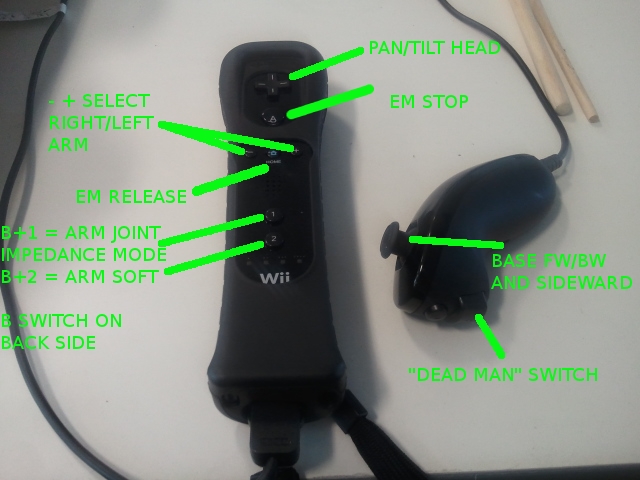
- Use the Wii controller as following.
- In “demo_scripts” package (tumros-internal) there are also several demo programs
{kind=link}
Rosie Bringdown Procedure
- Terminate “rosie.launch”
- Turn off the relays (you should hear the click-click sound)
rosrun power_relay off
- Switch off the arms on Kuka control boxes.
- Engage the emergency stop for the base and the PC modules.
- Disconnect the Kinect sensor.
tutorials/rosie_bringup.txt · Last modified: by kresse · [Old revisions]